1. Tujuan [back]
Mahasiswa mampu memecahkan kasus terkait perancangan fuzzy logic controller.
3. Dasar Teori [back]

KLASIFIKASI DATA SINYAL EOG UNTUK PENGENDALIAN KURSI RODA MENGGUNAKAN ALGORITMA SUPPORT VECTOR MACHINE (SVM)
SUPPORT VECTOR MACHINE (SVM)
Support vector machine (SVM) merupakan suatu teknik yang digunakan untuk prediksi, baik dalam kasus klasifikasi maupun regresi. Secara sederhana konsep SVM yaitu usaha untuk mencari hyperplane terbaik yang digunakan sebagai pemisah dua buah kelas pada input space. Hyperplane terbaik merupakan suatu garis yang memisahkan kelas data yang memiliki margin terbesar. Margin adalah jarak antara hyperplane tersebut dengan data terdekat dari masing-masing kelas. Data yang paling dekat ini disebut support vector.


Untuk
menghitung nilai margin antara bidang pembatas menggunakan rumus jarak garis ke
titik pusat dinotasikan sebagai berikut:
Fungsi
ini biasanya digunakan untuk data yang sudah valid (available) dan merupakan
default tools dalam SVM. Persamaan fungsi kernel RGF dapat dinotasikan dengan:

Biasanya
digunakan untuk klasifikasi gambar. Persamaan kernel polynomial seperti
berikut:

Fungsi ini sering digunakan untuk neural networks. Berikut persamaannya.
4. Kernel Linear
Merupakan
fungsi kernel yang paling sederhana. Biasanya digunakan untuk klasifikasi teks.
Persamaan fungsinya yaitu:
Multiclass Support Vector Machine (SVM)

2.1.1. 2. Metode
One-against-one (satu lawan satu)
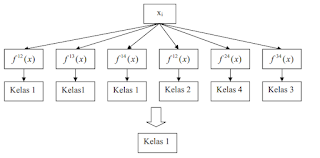
Support
Vector Machine (SVM) digunakan pada kasus pengendalian kursi roda menggunakan
sinyal gerakan mata. Pengujian yang dilakukan dengan
menggunakan algoritma multiclass one vs one. Sinyal diambil menggunakan sensor
EOG. Data yang diperoleh akan di kelompokkan menjadi 5, yaitu.
1. Kedip
sadar untuk memulai pergerakan kursi Roda
2. Lirik Atas untuk gerakan maju
3. Lirik Bawah untuk gerakan mundur
4. Lirik Kanan untuk membuat kursi roda bergerak ke arah kanan
5. Lirik Kiri untuk membuat kursi roda bergerak ke arah kiri
Pengelompokkan
data ditentukan berdasarkan beberapa variable (Feature) diantaranya,
1. Perioda
sinyal Ch1
2. Periode
sinyal Ch2
3. Luas
sinyal Ch1
4. Luas
sinyal Ch2
5. Nilai
Max Ch1
6. Nilai
Max Ch2
7. Nilai
Min Ch1
8. Nilai
Min Ch2
Fungsi hyperline didapatkan untuk memisahkan kelas. Fungsi hyperplane yang terbaik didapatkan dari data yang terdekat dengan fungsi hyperpline dengan margin yang paling besar.
Dataset yang digunakan
Data
50 responden yang sama dilakukan 5 gerakan untuk masing-masing responden, dan
masing masing gerakan dilakukan pengulangan sebanyak 20 kali. Sejumlah 34 orang
sebagai data latih dan 16 orang sebagai data uji. Total data dari 50 responden
untuk masing – masing gerakan adalah 1000 data, dengan 5 gerakan berbeda,
sehingga total data keseluruhan 5000 data. Dari 5000 data, 3400 data sebagai
data latih dan 1600 sebagai data uji.

Target ini digunakan
untuk pengelompokkan kelas. Pengelompokkan ini didasarkan pada hasil pengujian
data latih terhadap data uji. Target ini terdiri dari 5 bagian yaitu.
a. Kedip
sadar diwakilkan oleh angka 1
b. Lirik atas sadar diwakilkan oleh angka 2
c. Lirik Bawah diwakilkan oleh angka 3
d. Lirik Kanan diwakilkan oleh angka 4
e. Lihat kiri diwakilkan oleh angka 5







.